1 / 3
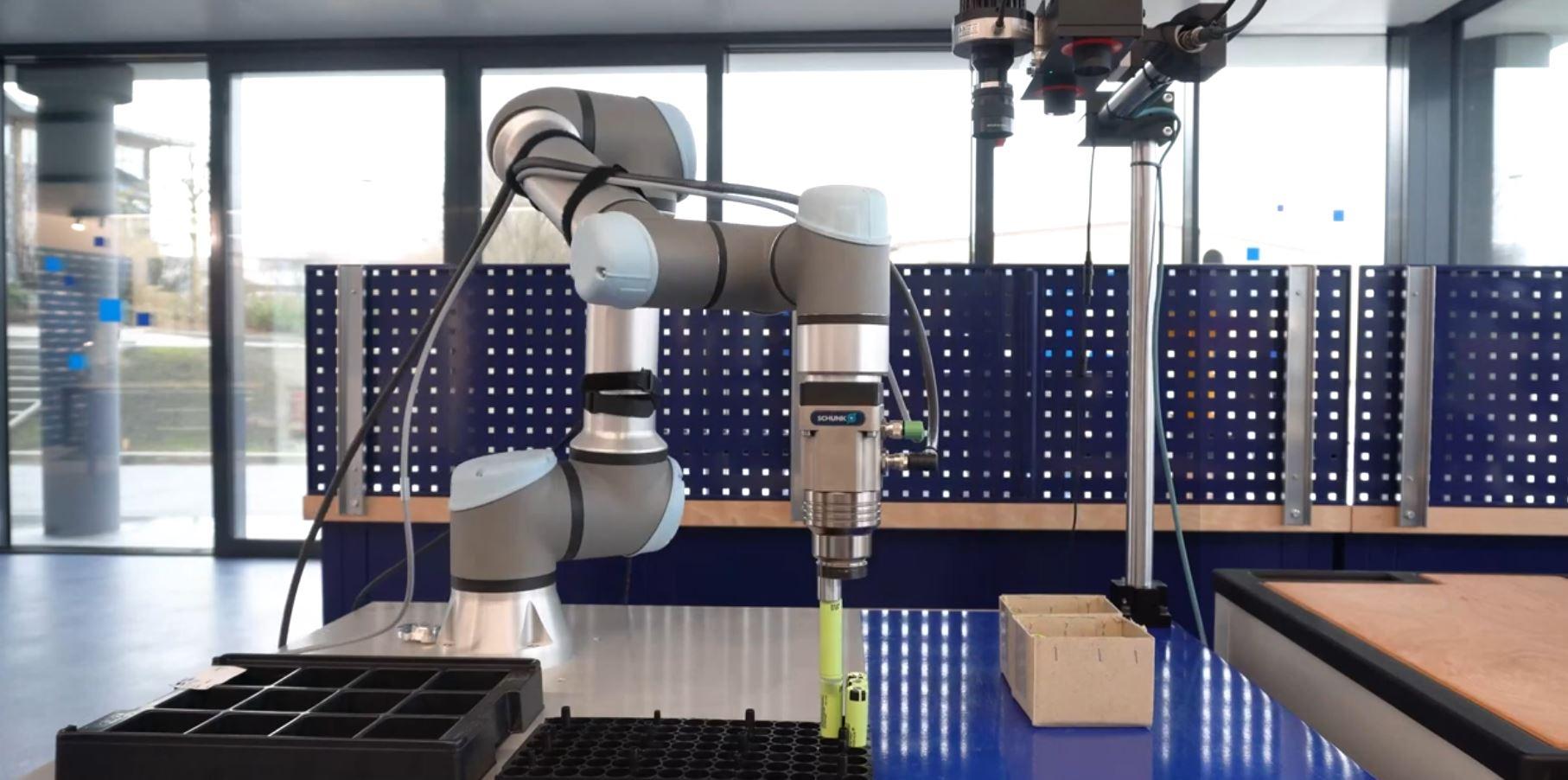
1 / 3Vision based Pick and Place application with rotary gripper




하드웨어 가격:
Flexibility
high
정밀도
높음
DOF
3
This video presents a customer test setup in which small components are moved on a conveyor belt in a robot cell. At the beginning of the video, we see how the small components are placed on the conveyor belt. They are then transported into the robot cell. A camera strategically placed in the cell recognizes the exact position of the parts on the belt. Once the camera has captured the coordinates of the parts, this information is passed on to a delta robot mounted on top. This robot is equipped with a pneumatic rotary gripper that grips the parts precisely. The delta robot then moves, controlled by the coordinates provided by the camera, and always places the parts in the same orientation. This process demonstrates the precision and efficiency of the robot cell when handling small components. In summary, this video is an excellent representation of the application of modern robot technology in manufacturing and assembly. It shows how efficient and accurate handling of small components can be achieved through the use of cameras, delta robots and pneumatic rotary grippers.
4 구성품